Research
Selected Publications
Please see my Google Scholar Page for the latest updates.
3D with Generative Models
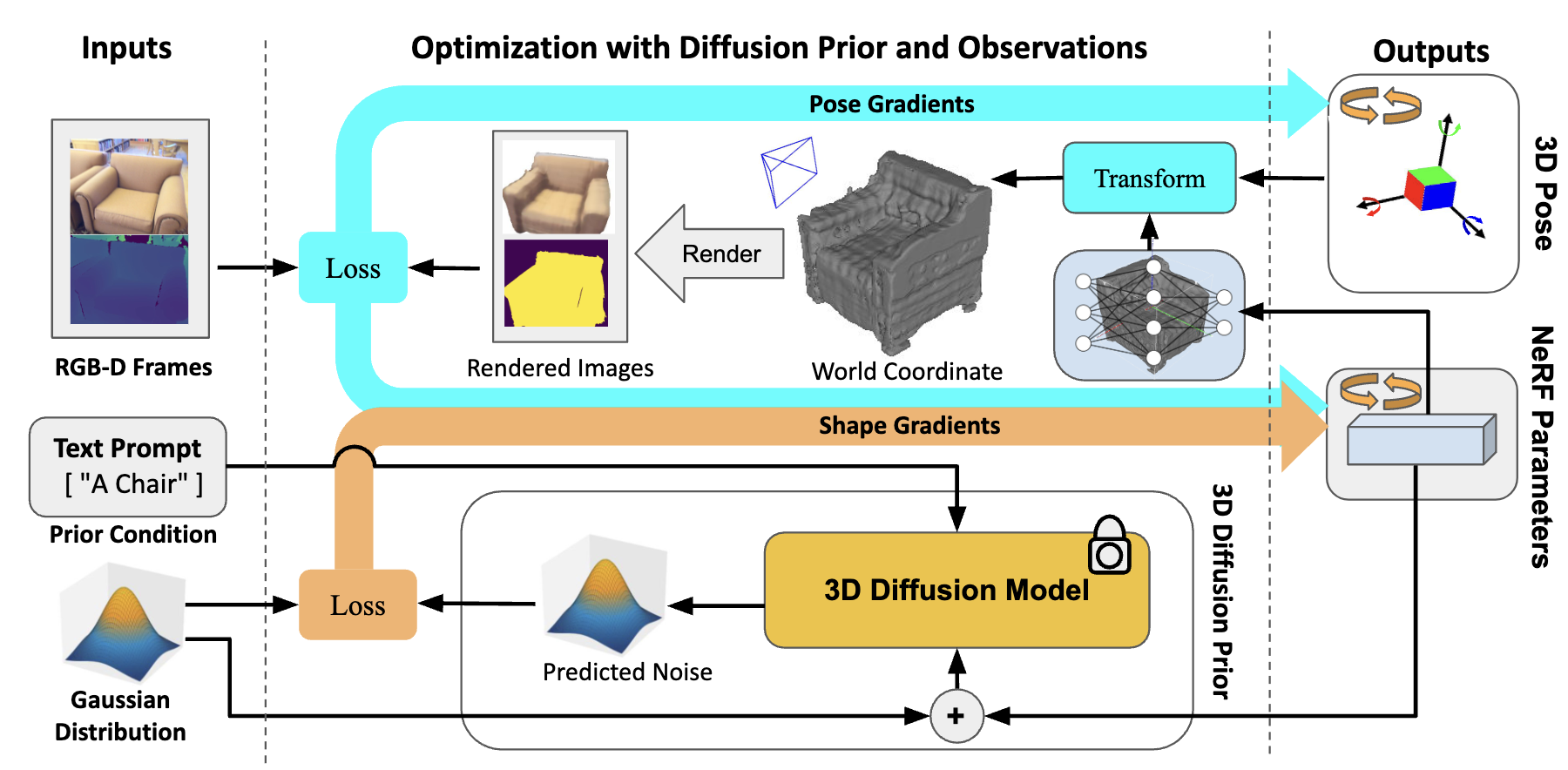 | Toward General Object-level Mapping from Sparse Views with 3D Diffusion Priors
Ziwei Liao, Binbin Xu, Steven L. Waslander
CoRL 2024
[PDF] [Code] |
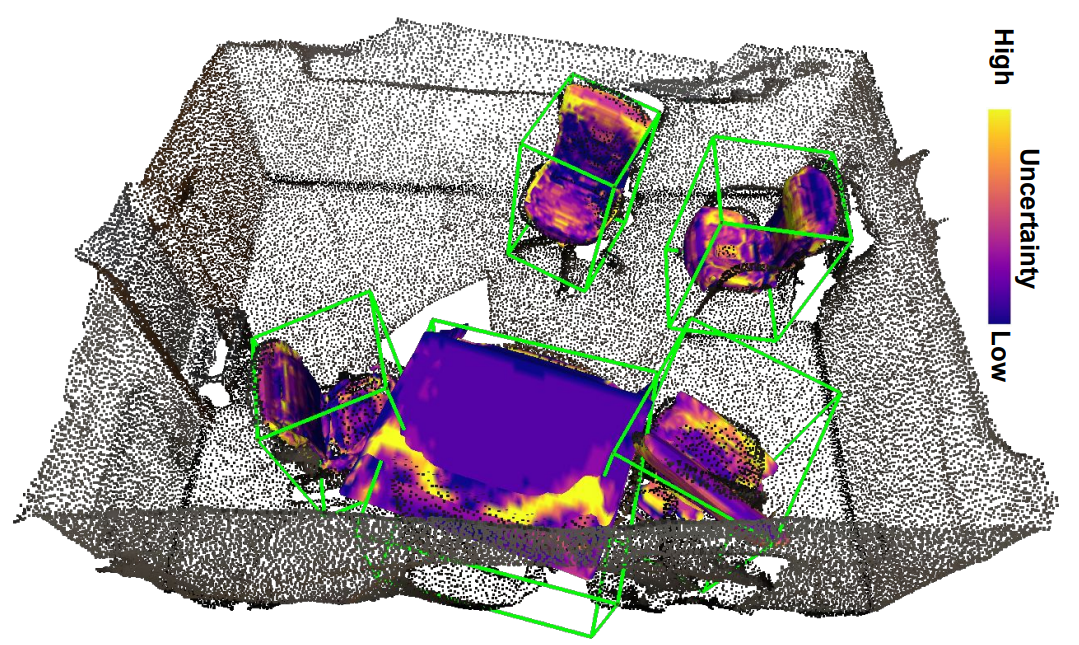 | Uncertainty-aware 3D Object-Level Mapping with Deep Shape Priors
Ziwei Liao*, Jun Yang*, Jingxing Qian*, Angela P. Schoellig, Steven L. Waslander
ICRA 2024
[PDF] [Code] |
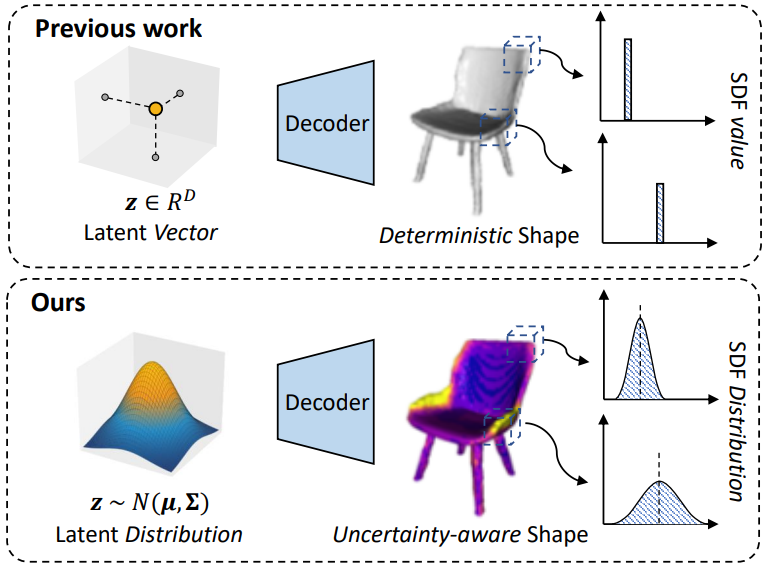 | Multi-view 3D Object Reconstruction and Uncertainty Modelling with Neural Shape Prior
Ziwei Liao, Steven L. Waslander
WACV 2024
[PDF] |
3D Human Pose
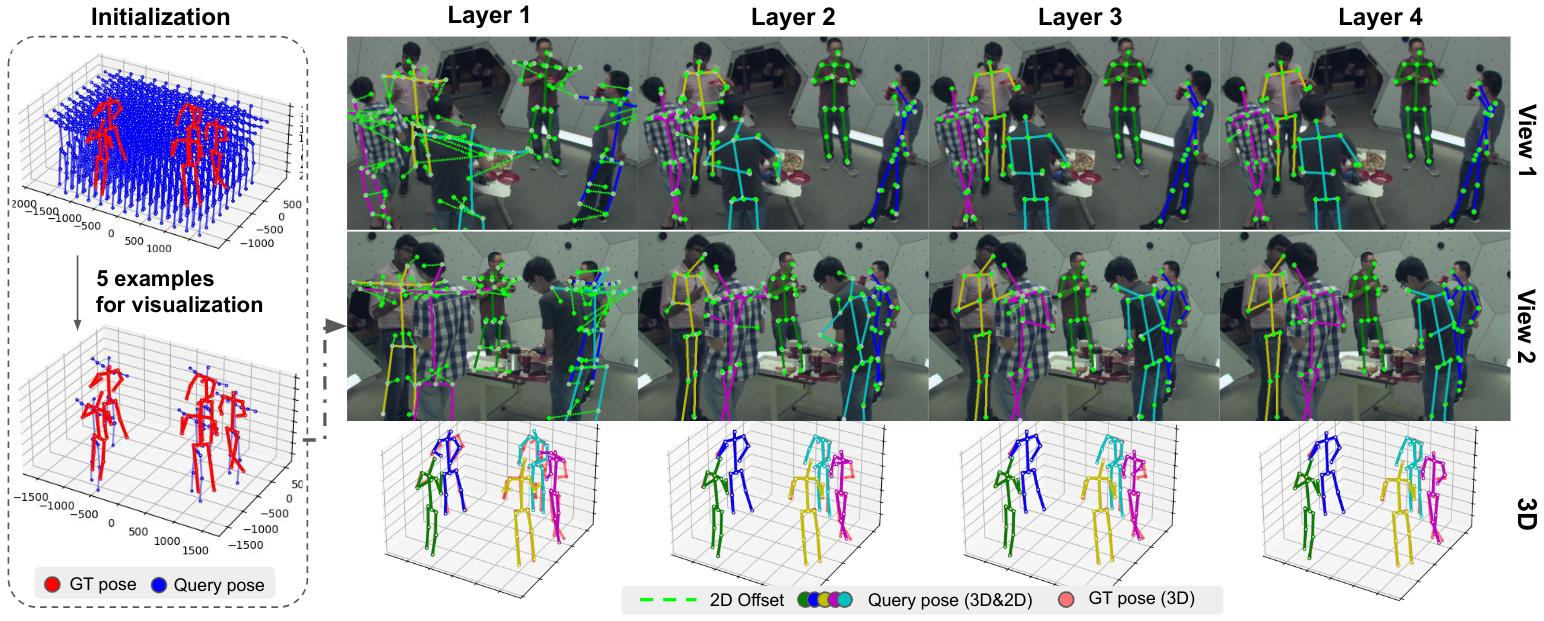 | Multiple View Transformers for 3D Human Pose Estimation
Ziwei Liao*, Jialiang Zhu*, Chunyu Wang, Han Hu, Steven Waslander
CVPR 2024
[PDF][Code] |
3D Object-level SLAM
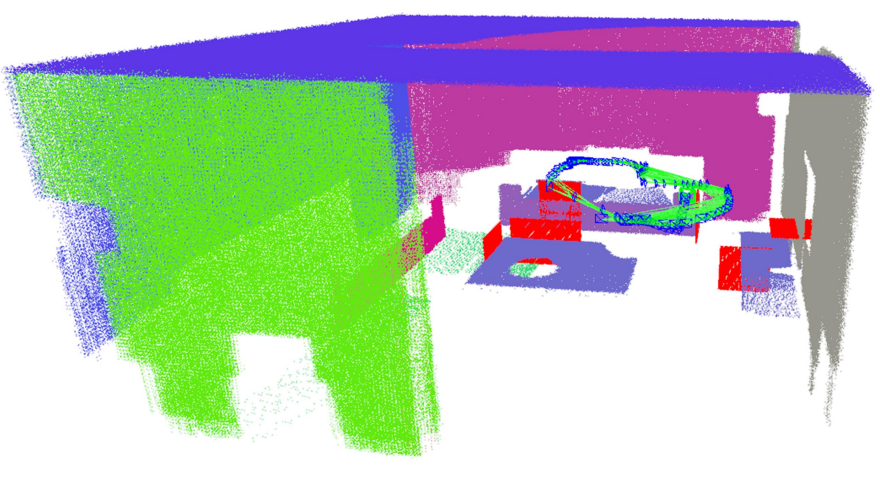
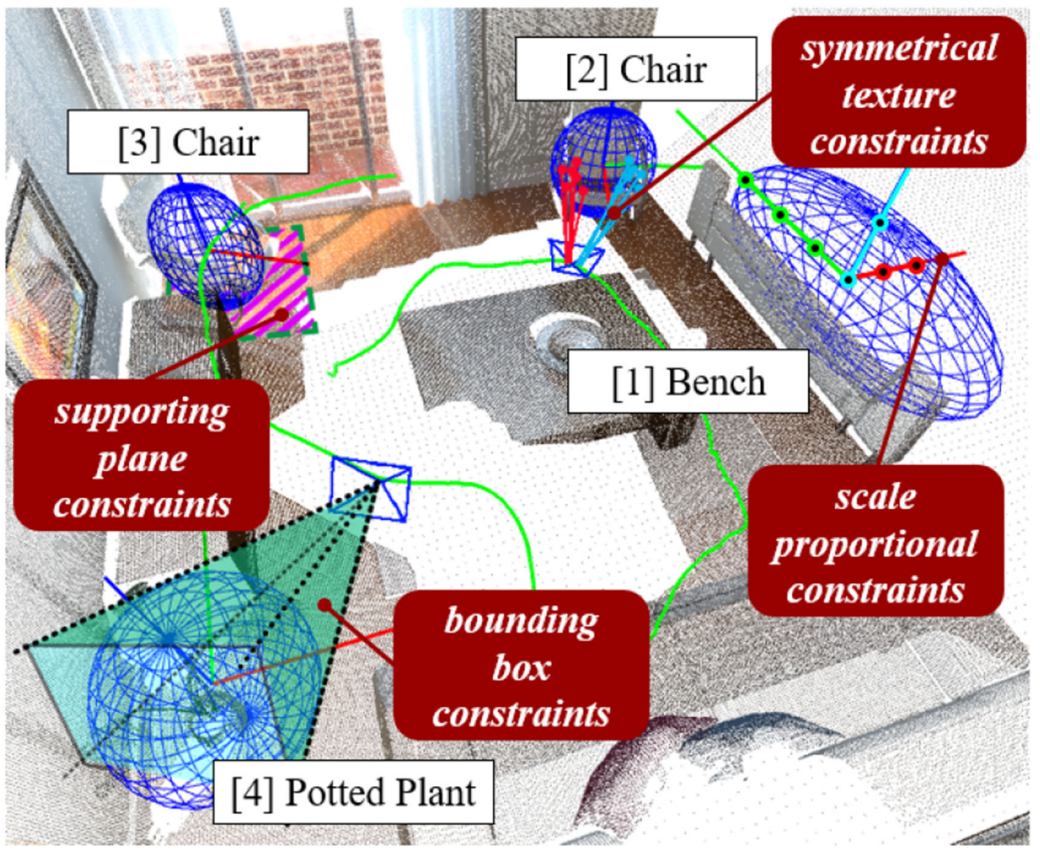 | SO-SLAM: Semantic Object SLAM with Scale Proportional and Symmetrical Texture Constraints
Ziwei Liao, Yutong Hu, Jiadong Zhang, Xianyu Qi, Xiaoyu Zhang, Wei Wang
RA-L & ICRA22
[IEEE] [arXiv] |
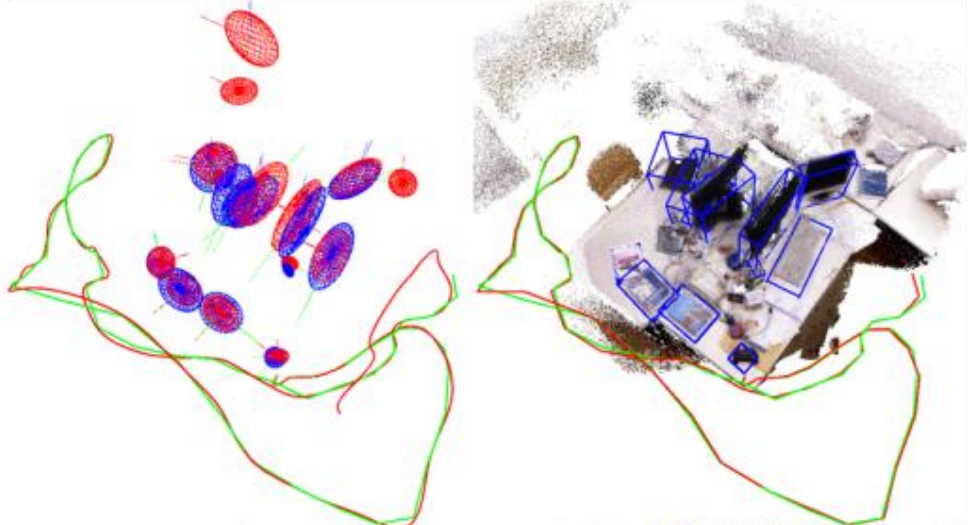 | RGB-D Object SLAM using Quadrics for Indoor Environments
Ziwei Liao, Wei Wang, Xianyu Qi, Xiaoyu Zhang
Sensors, 2020
[PDF] [Video] |
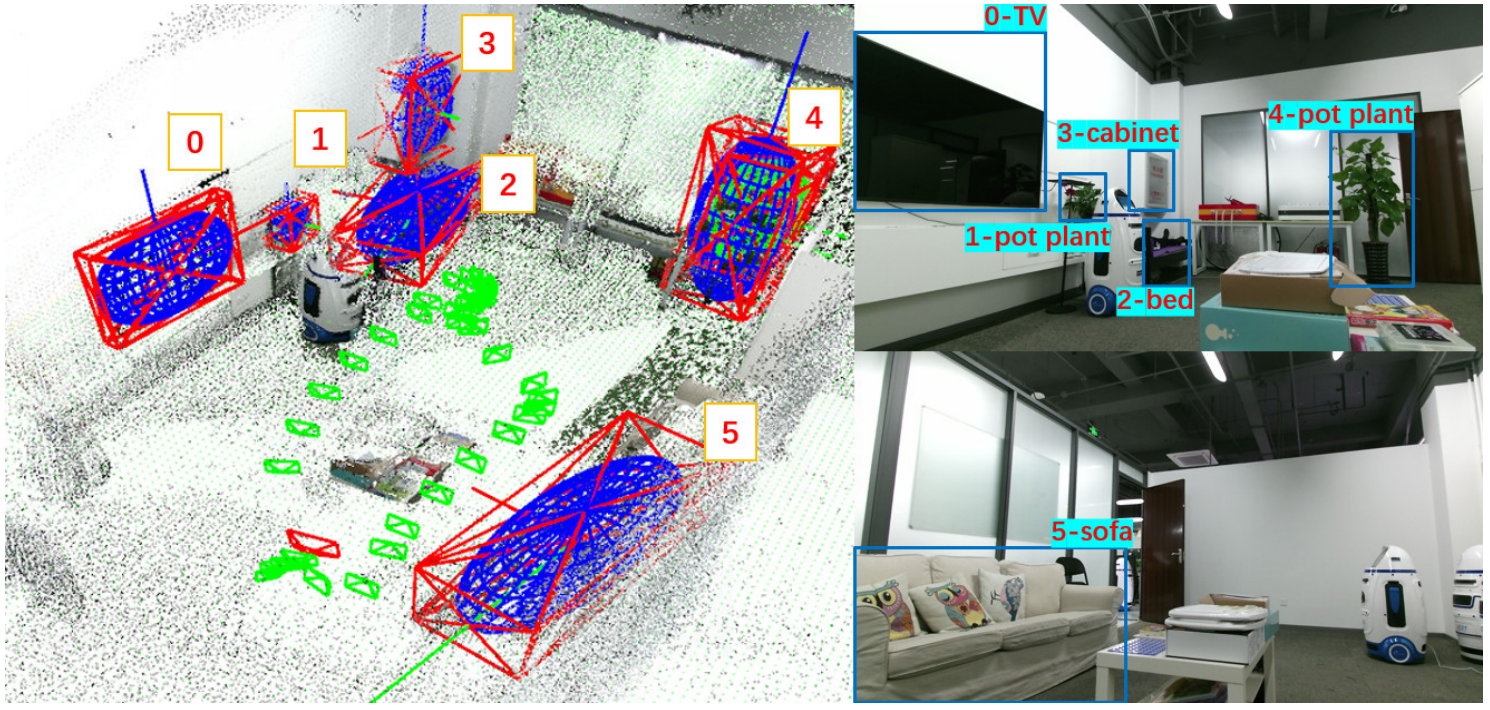 | Object-oriented SLAM using Quadrics and Symmetry Properties for Indoor Environments
Ziwei Liao, Wei Wang, Xianyu Qi, Xiaoyu Zhang, Lin Xue, Jianzhen Jiao, Ran Wei
ArXiv, 2020
[PDF] [Code] [Video] |
Mapping, Localization, SLAM
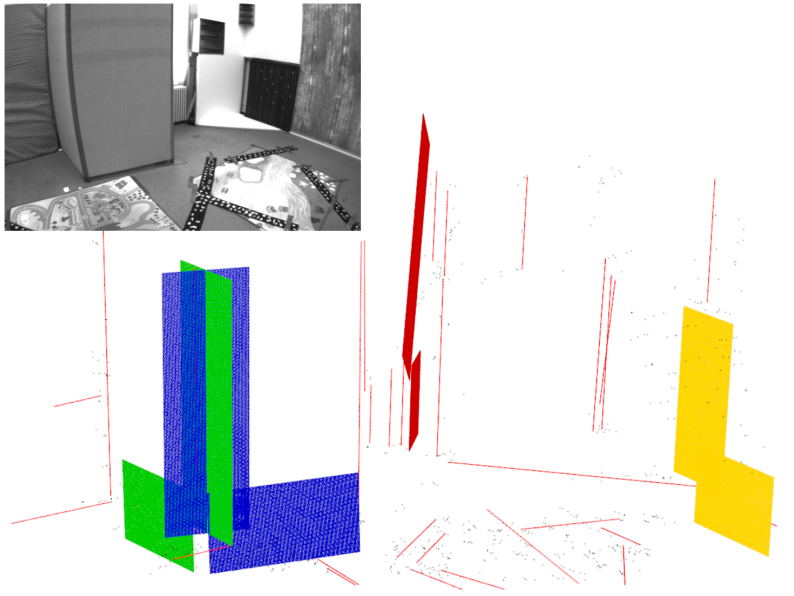 | Stereo plane slam based on intersecting lines
Xiaoyu Zhang, Wei Wang, Xianyu Qi, Ziwei Liao
IROS 2021
[IEEE] [arXiv] [Code] |
 | Point-Plane SLAM Using Supposed Planes for Indoor Environments
Xiaoyu Zhang, Wei Wang, Xianyu Qi, Ziwei Liao, Ran Wei
Sensors, 2019
[PDF] [Code] |
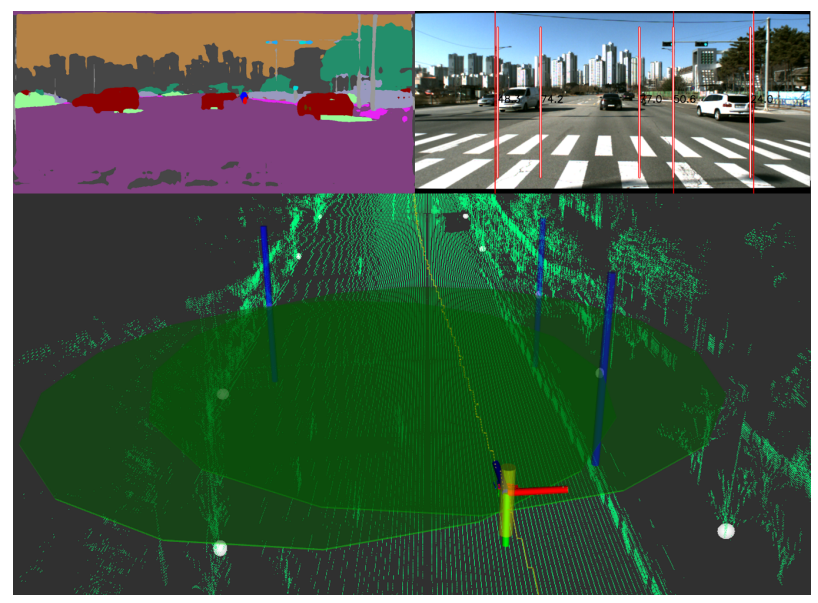 | Coarse-To-Fine Visual Localization Using Semantic Compact Map
Ziwei Liao, Jieqi Shi, Xianyu Qi, Xiaoyu Zhang, Wei Wang, Yijia He, Ran Wei, Xiao Liu
2020 3rd International Conference on Control and Robots (Best Session Presentation)
[PDF] [Video] |
Robots Navigation
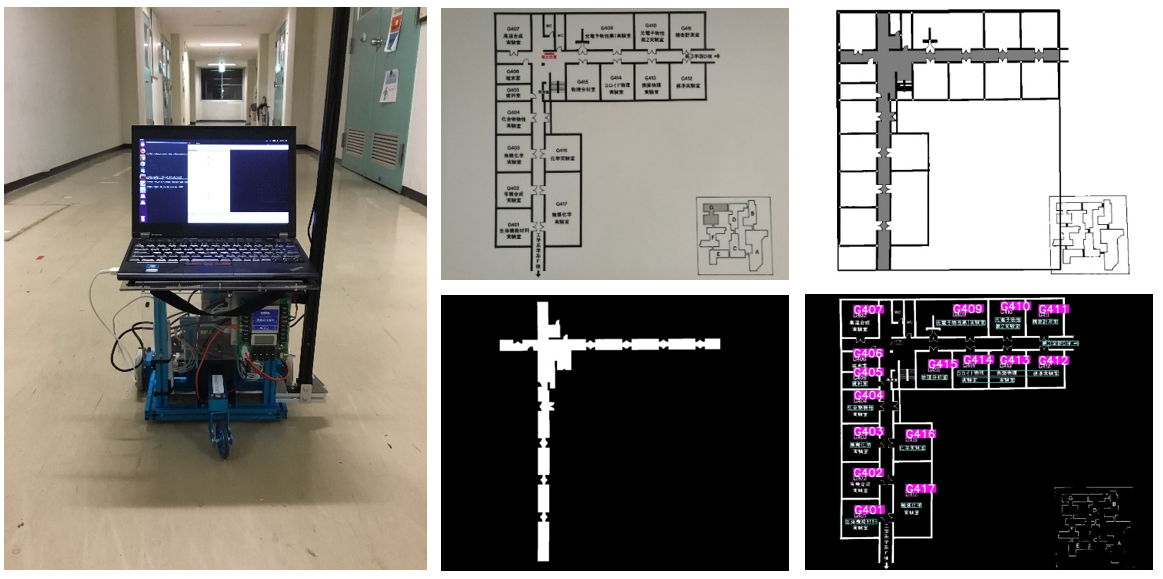 | Semantic Navigation for Indoor Robots with Corridor Map Prior
Ziwei Liao, Akihisa Ohya
Research Project at Tsukuba University, Japan, 2017
[Video] |
 | Object Semantic Grid Mapping with 2D LiDAR and RGB-D Camera for Domestic Robot Navigation
Xianyu Qi, Wei Wang, Ziwei Liao, Xiaoyu Zhang, Dongsheng Yang, Ran Wei
Applied Sciences, 2020
[PDF] |
Experiences with real robots
 | I am a big fan of robots and my college life is full of activities related to robotics competitions and electronics design projects.
I joined the Beihang Robot Team for the Robocon National Robotics Competition (2016-2018); designed a rotorcraft with a master-slave mechanical arm (2015); and had fun with some robots during my bachelor's and master's projects.
I was once the president of the Robot Association of Beihang University (2015-2016). |
