
Home
Biography
Hello, I am Ziwei, an Applied Scientist at Wayve AI based in London, UK. My current work focuses on world models (GAIA) for representing real-world environments and developing embodied AI systems that operate in the physical world.
My long-term research goal is to develop general, scalable, and safe robots that operate in the real world and integrate into human society to help solve real-world tasks.
I received my Ph.D. (2021–2025) from the Toronto Robotics and AI Lab at the University of Toronto, supervised by Prof. Steven L. Waslander. During this time, I was also affiliated with the Institute for Aerospace Studies (UTIAS), the UofT Robotics Institute, and the Vector Institute.
I have collaborated with researchers at Niantic Labs (London, UK, 2024), Microsoft Research Asia (2023), and Megvii Research (Face++, 2021) as a research intern.
I earned my M.Sci. (2021) and B.E. (2018) degrees from the Robotics Institute at Beihang University in Beijing, China. In 2017, I was a visiting research assistant at the Intelligent Robot Laboratory at the University of Tsukuba, Japan.
Please refer to my [CV] for more details.
Research Interests
My research focuses on the intersection of computer vision, generative models, and robotics. Please see my Google Scholar for a full list of publications.
I am interested in building world models that enable machines to perceive, understand, and interact with real-world 3D environments. More specifically:
World Representations for Objects and Scenes: Gaussian splatting and implicit representations (e.g., NeRF, SDF).
Self-Supervised Generative Learning: Learning 3D representations from large-scale image and video data using diffusion models.
Learning for Ill-Posed 3D Perception: Developing methods for 3D reconstruction and perception from sparse-view images, leveraging generative models as priors, and quantifying uncertainty.
If you are interested in these topics, feel free to reach out for discussion or potential collaboration.
News
[09/2025] I joined Wayve as an Applied Scientist, working on world models. We announced GAIA 3, scaling world models for safety and evaluation.
[12/2024] A paper on 3D Gaussian splatting with diffusion models, in collaboration with Niantic Labs, is available on arXiv.
[09/2024] A paper on general object-level mapping with a 3D diffusion model was accepted as a Spotlight presentation at CoRL 2024, held in Munich, Germany.
[02/2024] A paper on 3D human pose estimation with transformers was accepted to CVPR 2024, in collaboration with Microsoft Research Asia, held in Seattle, USA.
[01/2024] A paper on object-level mapping (3D pose and shape) with uncertainty was accepted to ICRA 2024, held in Yokohama, Japan.
[10/2023] A paper on 3D object reconstruction with uncertainty was accepted to WACV 2024, held in Hawaii, USA.
[02/2022] A paper on monocular object-level SLAM with quadrics (SO-SLAM) was accepted to IEEE RA-L and presented at ICRA 2022.
…
Academic Service
I have served as a reviewer for:
- Journals: The International Journal of Robotics Research (IJRR), IEEE Robotics and Automation Letters (RA-L)
- Conferences: CVPR (2023–2024), ECCV (2024), NeurIPS (2024), ICLR (2025), ICML (2025), ICRA (2023–2024), WACV (2024–2025)
Selected Publications
Please see my Google Scholar page for the latest updates.
3D with Generative Models
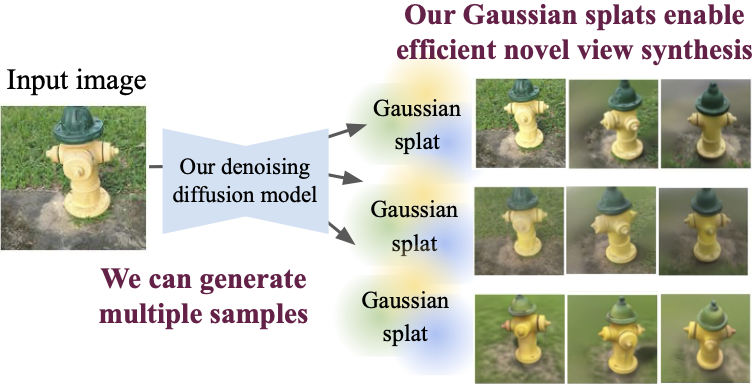 | Complete Gaussian Splats from a Single Image with Denoising Diffusion Models |
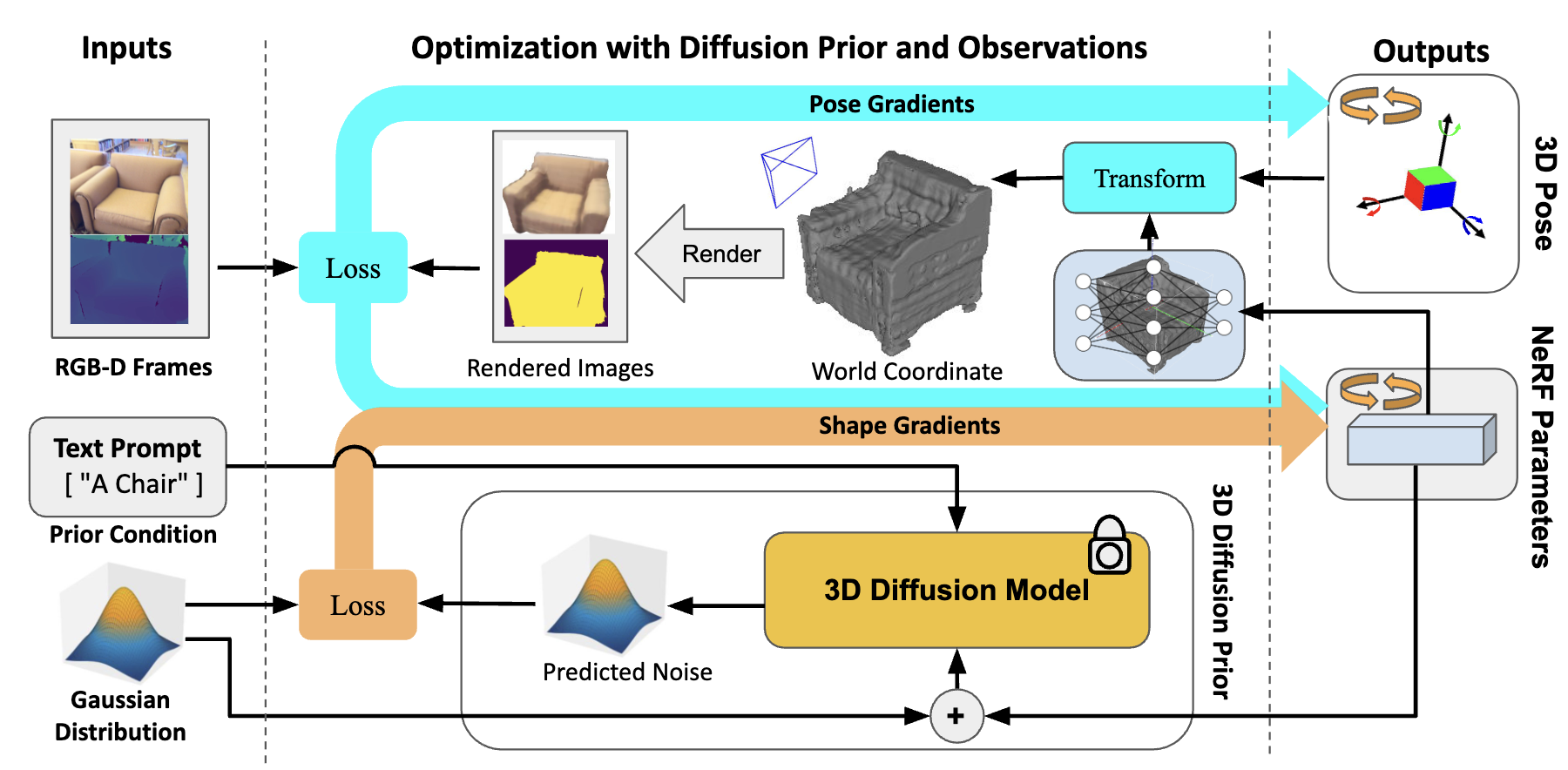 | Toward General Object-level Mapping from Sparse Views with 3D Diffusion Priors |
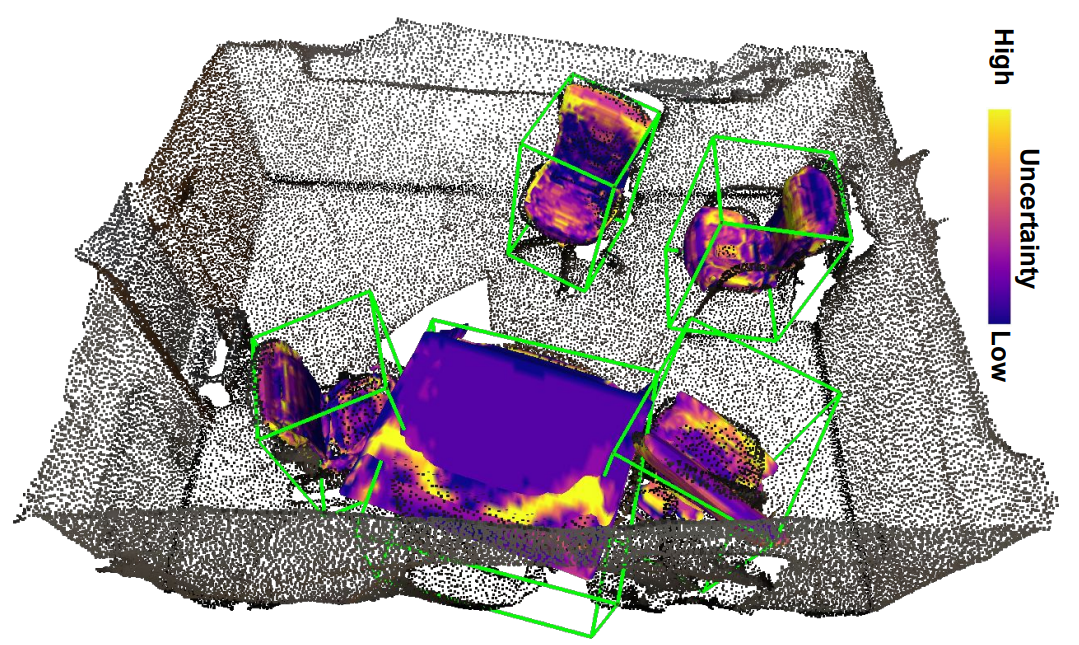 | Uncertainty-aware 3D Object-Level Mapping with Deep Shape Priors |
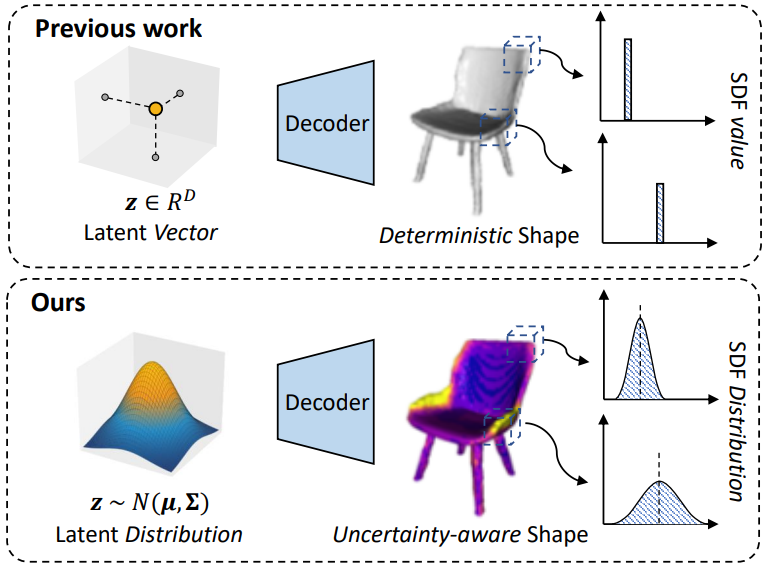 | Multi-view 3D Object Reconstruction and Uncertainty Modelling with Neural Shape Prior |
3D Human Pose
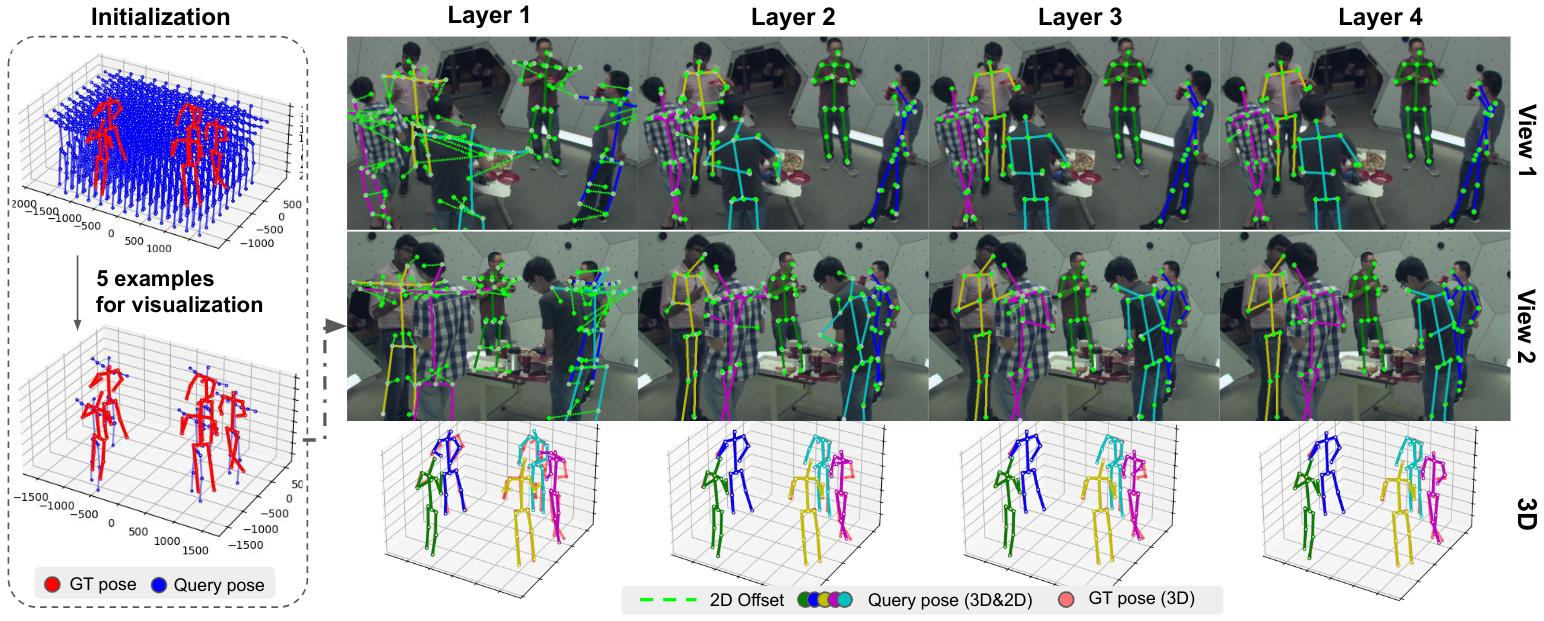 | Multiple View Transformers for 3D Human Pose Estimation |
3D Object-level SLAM
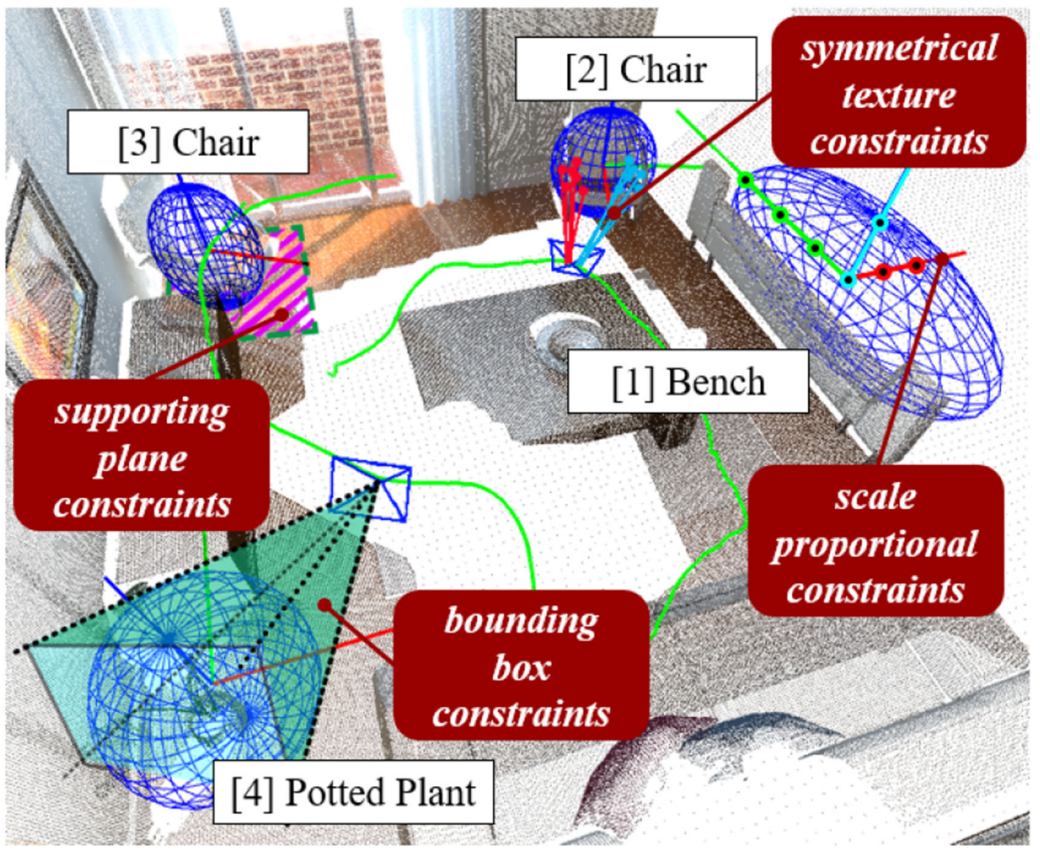 | SO-SLAM: Semantic Object SLAM with Scale Proportional and Symmetrical Texture Constraints |
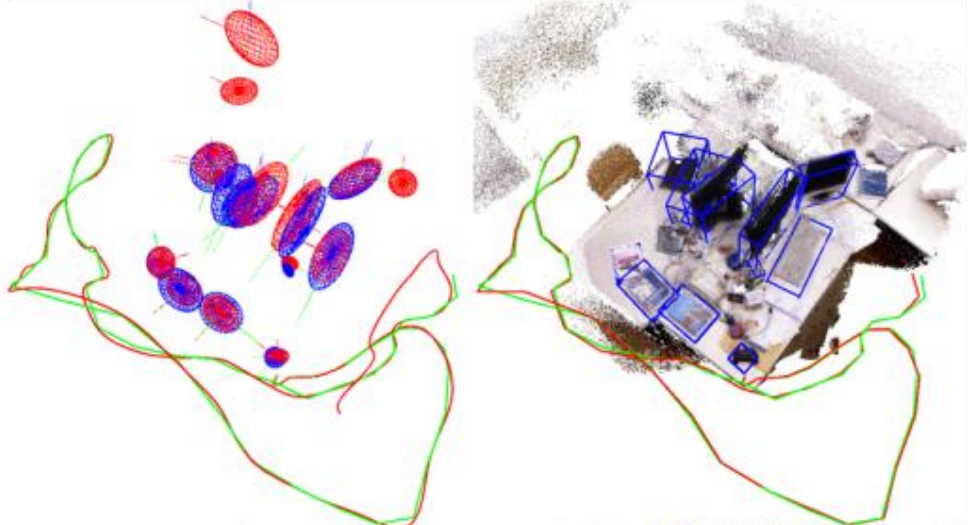 | RGB-D Object SLAM using Quadrics for Indoor Environments |
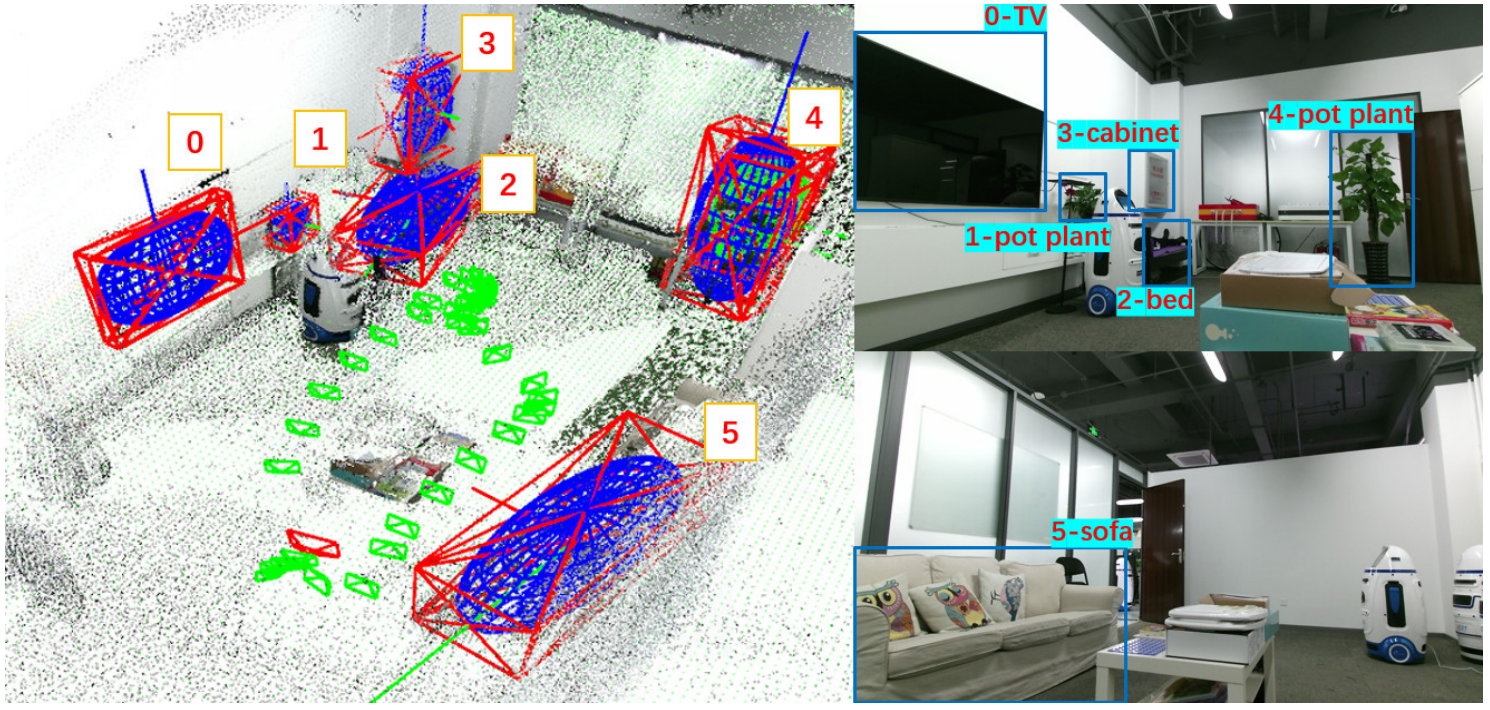 | Object-oriented SLAM using Quadrics and Symmetry Properties for Indoor Environments |
Mapping, Localization, SLAM
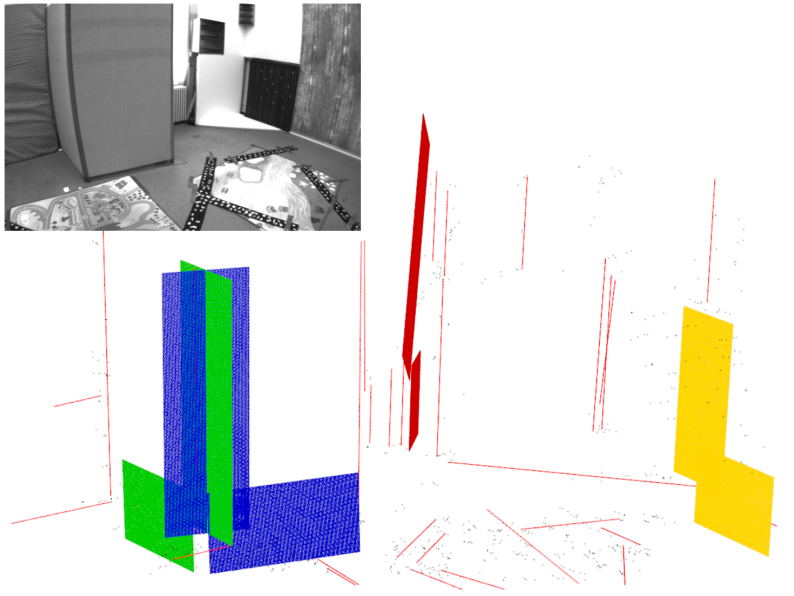 | Stereo plane slam based on intersecting lines |
 | Point-Plane SLAM Using Supposed Planes for Indoor Environments |
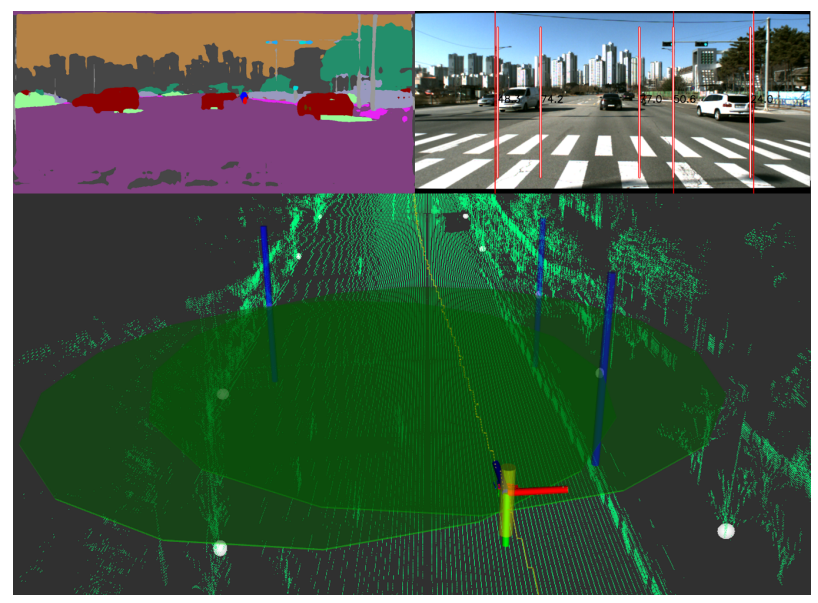 | Coarse-To-Fine Visual Localization Using Semantic Compact Map |
Robots Navigation
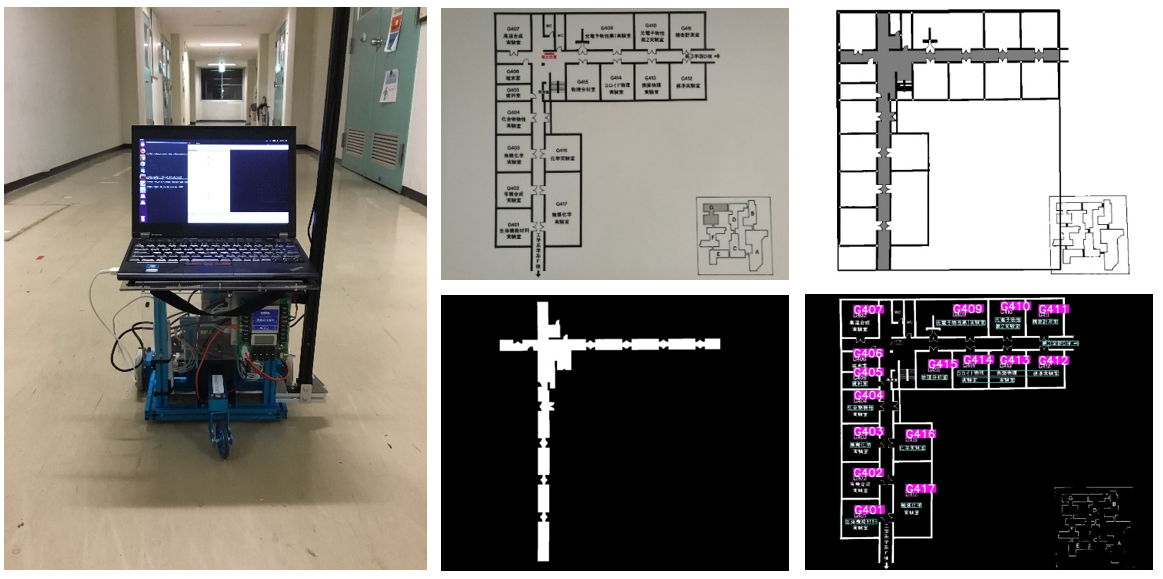 | Semantic Navigation for Indoor Robots with Corridor Map Prior |
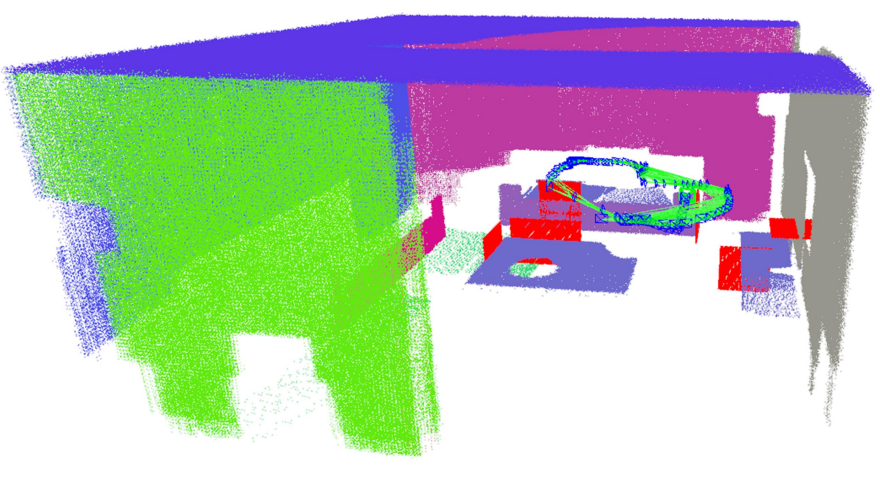
 | Object Semantic Grid Mapping with 2D LiDAR and RGB-D Camera for Domestic Robot Navigation |
Hands-On Experience with Real-World Robots
 |
I have been deeply interested in robotics throughout my studies.
I served as Vice Captain of the Robotics Team at Beihang University, where I participated in the RoboCon National Robotics Competition (2016–2018). I also designed a rotorcraft equipped with a master-slave robotic arm (2015). During my bachelor’s and master’s studies (2018, 2021), I worked with a variety of robotic systems on research projects. In addition, I served as President of the Robotics Student Association at Beihang University (2015–2016).
Hobbies
- I enjoy tennis, cooking, PC games, and TV series and movies, especially science fiction and history.
- I enjoy traveling and have lived long-term in China, Japan, and the UK.